

الکتروموتور چیست؟
اصولا الکتروموتور یا موتور الکتریکی در انواع الکتروموتور معمولی (TEFC) و یا نوع دیگر آن یعنی الکتروموتور ضد انفجار و همچنین موتور کولری و از لحاظ برق مصرفی در دو نوع الکتروموتور تک فاز و الکتروموتور سه فاز ارائه می گردد.
تاریخچه الکتروموتور
در ۱۸۸۲ نیکولا تسلا اصول میدان مغناطیسی دوار را پایه گذاری کرد و راه را برای استفاده از میدان دوار به عنوان یک نیروی مکانیکی باز کرد. در سال ۱۸۸۳ او از این اصول برای طراحی یک موتور القایی دو فاز استفاده کرد. در ۱۸۸۵ گالیلئو فراریس (Galileo Ferraris) مستقلاً تحقیقاتی را در این باره آغاز کرد و در ۱۸۸۸ نتایج تحقیقات خود را در قالب مقاله ای به آکادمی سلطنتی علوم در تورین ایتالیا ارائه داد.
حرکتی که نیکولا تسلا در ۱۸۸۸ آغاز کرد چیزی بود که امروزه برخی از آن به عنوان انقلاب صنعتی دوم یاد می کنند، چرا که این حرکت به تولید آسان تر انرژی الکتریکی و همچنین امکان انتقال انرژی الکتریکی در طول مسافت های طولانی انجامید. قبل از اختراع موتورهای جریان متناوب به وسیله تسلا موتورها به وسیله حرکت دائم یک هادی در میان میدان مغناطیسی ثابت به حرکت در می آمدند. تسلا به این نکته اشاره کرد که می توان کلکتورهای موتور را حذف کرد بطوریکه موتور به وسیله میدانی دوار به حرکت در آید. تسلا بعدها موفق به کسب حق امتیاز شماره ۰٫۴۱۶٫۱۹۴ ایالات متحده برای اختراع موتور خود شد. این موتور که در بسیاری از عکس های تسلا نیز هست نوع خاصی از موتور القایی بود.
در سال ۱۸۹۰ میخایل اسیبوویچ یک موتور سه فاز روتور قفسی اختراع کرد. این نوع موتور امروزه به طور وسیعی برای کاربردهای گوناگون استفاده می شود.
راهنمای انتخاب صحیح الکتروموتور
انواع الکتروموتور
در زندگی پیشرفته ماشینی امروز انسانی پیدا نمی شود که با الکتروموتور یا موتور الکتریکی یا دینام برخورد نداشته باشد، گرچه ممکن است متوجه آن نباشد. به طور کلی هر کجا حرکتی در کار است، الکتروموتور یا موتور الکتریکی هم وجود دارد.
- موتور DC
- موتور سری
- موتور موازی
- موتور کمپوند
- موتور خود تحریک
- موتور مغناطیس دائم (PMDC)
- موتور AC
- موتور القایی
- موتور سنکرون
- موتورهای خاص
- موتور پله ای
- موتور DC بدون جاروبک
- موتور هیسترزیسی
- موتور رلوکتانسی
- موتور اونیورسال
الکتروموتور یا موتور الکتریکی (Electric Motor)
نوعی ماشین است که انرژی الکتریکی را به حرکت مکانیکی تبدیل می کند. ایده کلی بر این اساس است که وقتی که یک هادی حامل جریان الکتریسیته تحت اثر یک میدان مغناطیسی قرار می گیرد نیرویی بر روی آن هادی حامل جریان از سوی میدان مغناطیسی اعمال می شود. اغلب موتورهای الکتریکی دوار هستند. اما موتور خطی هم وجود دارند.
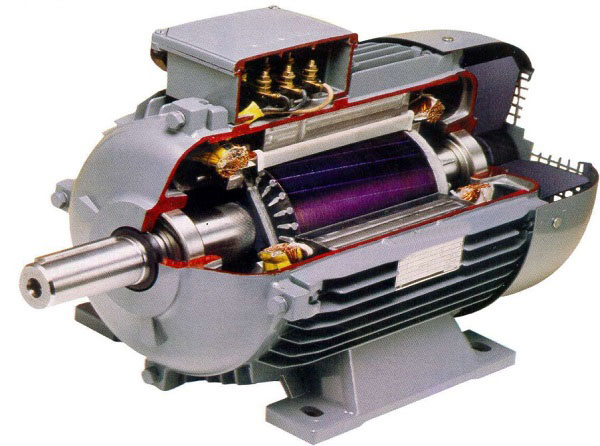
هر موتور الکتریکی دوار از دو بخش متحرک و محرک تشکیل شده است.که به بخش متحرک روتور و به بخش ثابت که معمولا درون موتور قرار دارد استاتور یا ایستانه نیز می گویند. در یک موتور الکتریکی، روتور به علت گشتاور ناشی از نیرویی ایجاد شده توسط میدان مغناطیسی در استاتور، به حول محور خود می چرخد. هر الکتروموتور بر اساس ساختارش توسط برق جریان مستقیم DC و یا جریان متناوب AC تغذیه می گردد.
نحوه انتخاب الکتروموتور
اولین نکته ای که در انتخاب یک الکتروموتور باید در نظر گرفته شود تکفاز یا سه فاز بودن ولتاژ برق محل نصب می باشد. الکتروموتورها بر اساس توان و دور و نحوه نصب انتخاب می شوند. در صورتیکه توان الکتروموتور مشخص نباشد، می توان با در نظر گرفتن گشتاور خروجی مورد نیاز، توان را مشخص نمود. توان الکتروموتور بر حسب کیلووات و گشتاور آن بر حسب نیوتن متر بیان می شود. دور الکتروموتور با توجه به دور نهایی دستگاه متحرک انتخاب می شود و معمولا 900، 1400 یا 2900 دور در دقیقه می باشد. الکتروموتورها را می توان بر روی پایه نصب کرد. در صورتیکه الکتروموتور به صورت مستقیم به گیربکس یا هیدروموتور کوپل شود، باید در خروجی دارای فلنج باشد. فلنج می تواند با توجه به نیاز مشتری به صورت کوچک (B14) یا بزرگ (B5) تولید شود. باید توجه داشت که پوسته الکتروموتورها از جنس چدن یا آلومینیوم می باشد که با توجه به شرایط کاری و وزن مورد نیاز و میزان لرزش دستگاه انتخاب می شود.